Introduction to digital control
Advanced Modeling and Control
Relationship between z-plane with s-plane
- Processes are stable if they do not possess the poles that lies outside the unit-circle in the z-plane.
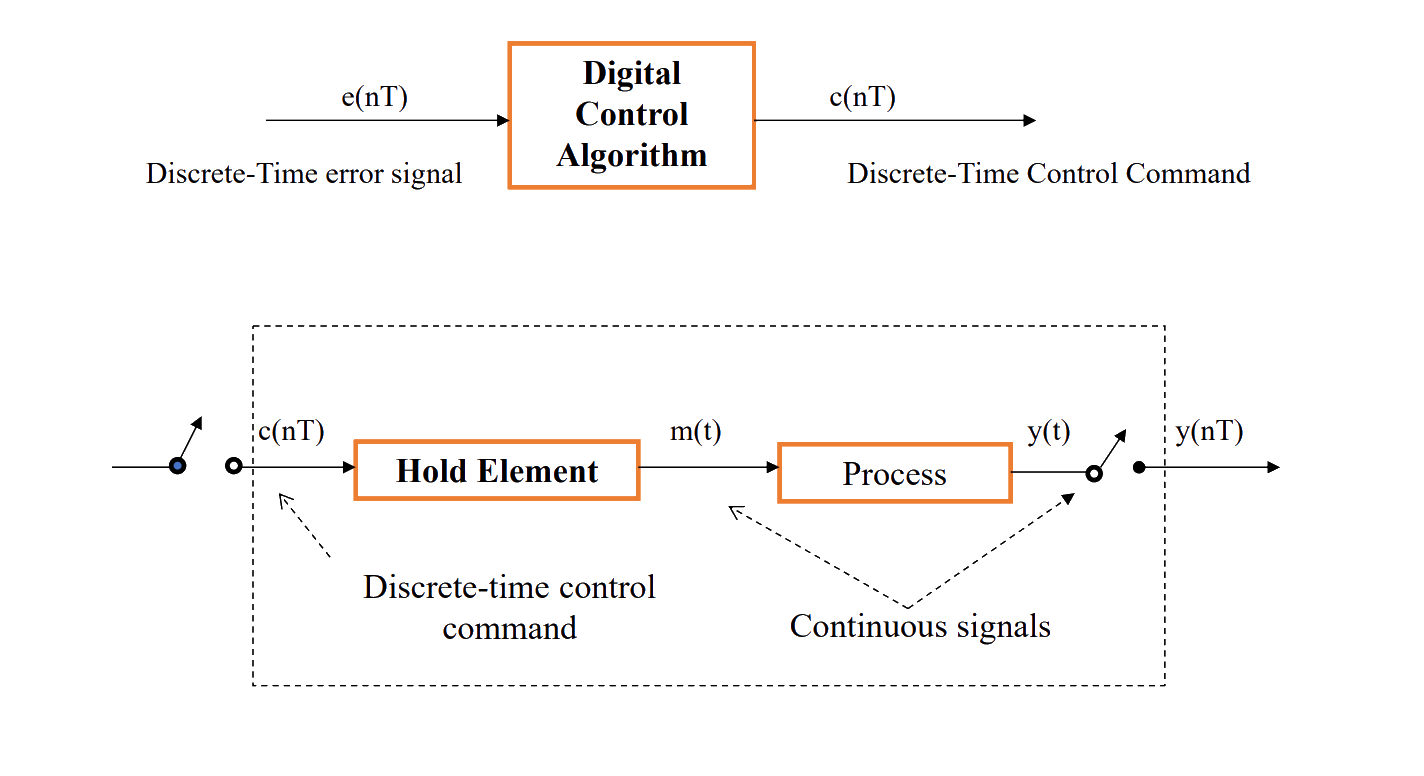
Direct digital control (DDC)
- Two Primary Components:
- Digital Control Algorithm: A discrete component responsible for processing the error and generating control commands in discrete-time.
- Process with Hold Elements: The hold elements convert the discrete-time control commands into continuous signals, enabling interaction with a continuous-time process (plant).
Discrete time analysis
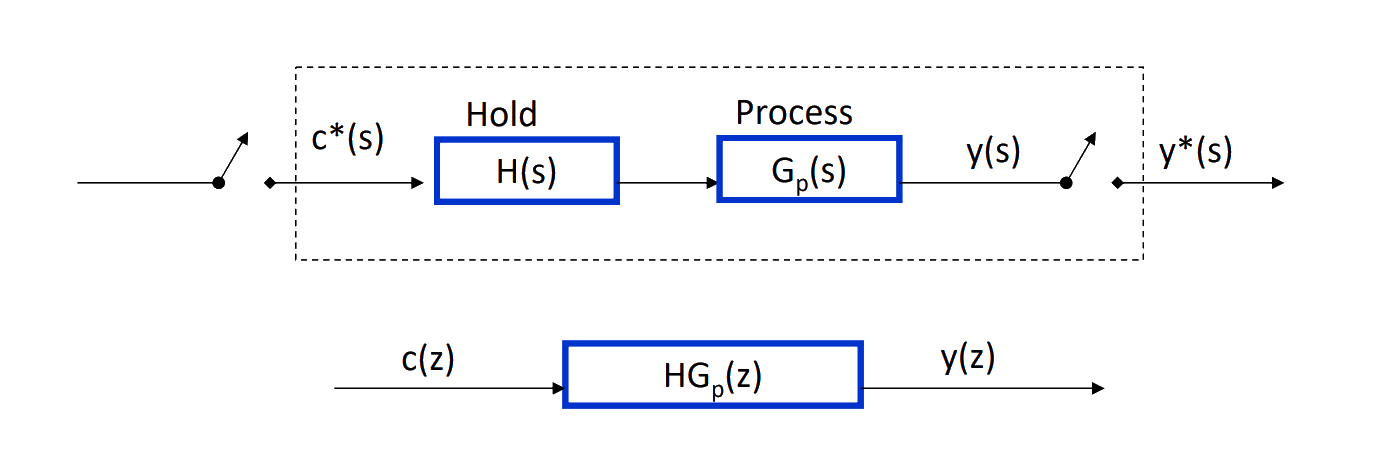
The pulse transfer function relates the discrete-time output y(nT) to the discrete-time control command c(nT) using z-transforms.
The system components consist of the hold element H(s) and the process G_p(s), combined as:
H(s) G_p(s)
The z-transform is applied to obtain the equivalent transfer function in the z-domain: \frac{Y(z)}{C(z)} = H G_p(z) = \mathcal{Z} \{ H(s) G_p(s) \}
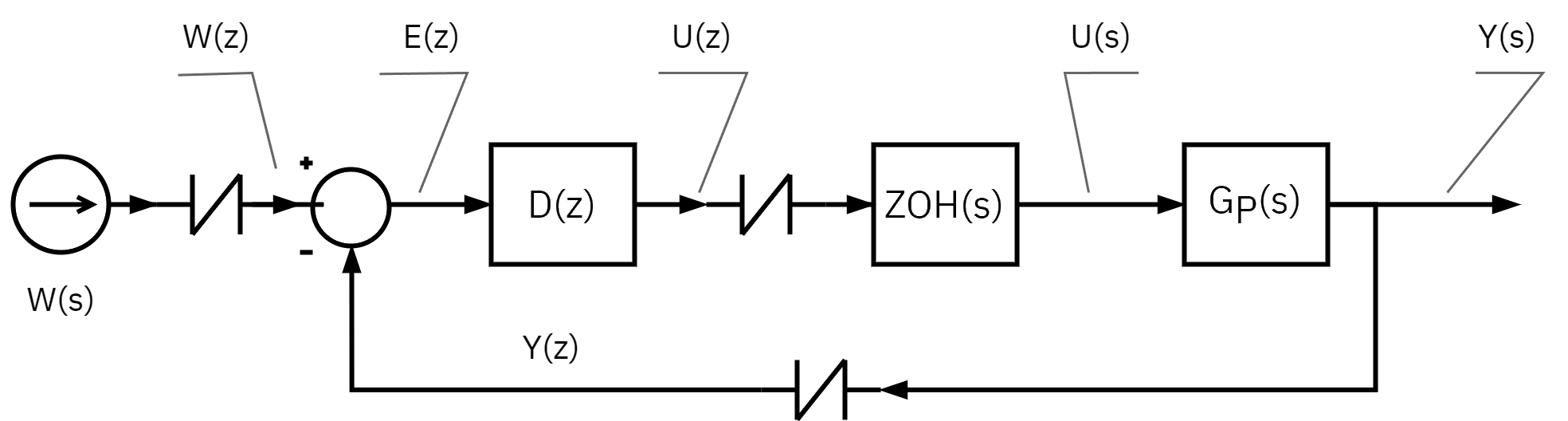
Block diagram manipulation
- Manipulation of block diagrams of sampled data systems are very similar to that for those in the Laplace domain.
- The z-transform is a special case of the Laplace transform.
- The presence of samplers, there are some extra rules to follow
- ZOH denotes zero-order hold element
z-transform of continuous-time transfer functions
System A

Y(z) = \mathcal{Z} \{ F(s) \} \cdot \mathcal{Z} \{ G(s) \} \cdot U(z)
Y(z) = F(z)G(z)U(z)
- Discretizes each transfer function separately and then multiplies them in the z-domain.
System B

Y(z) = \mathcal{Z} \{ F(s)G(s) \} \cdot U(z)
Y(z) = FG(z)U(z)
- First combines the transfer functions in the ( s )-domain and then applies the z-transform
The order of discretization and multiplication matters.
Applying the z-transform separately to each transfer function is generally not equivalent to applying the z-transform to the combined transfer function in the s-domain.