MIMO Systems: Decentralized control
Advanced Modeling and Control
Real life processes
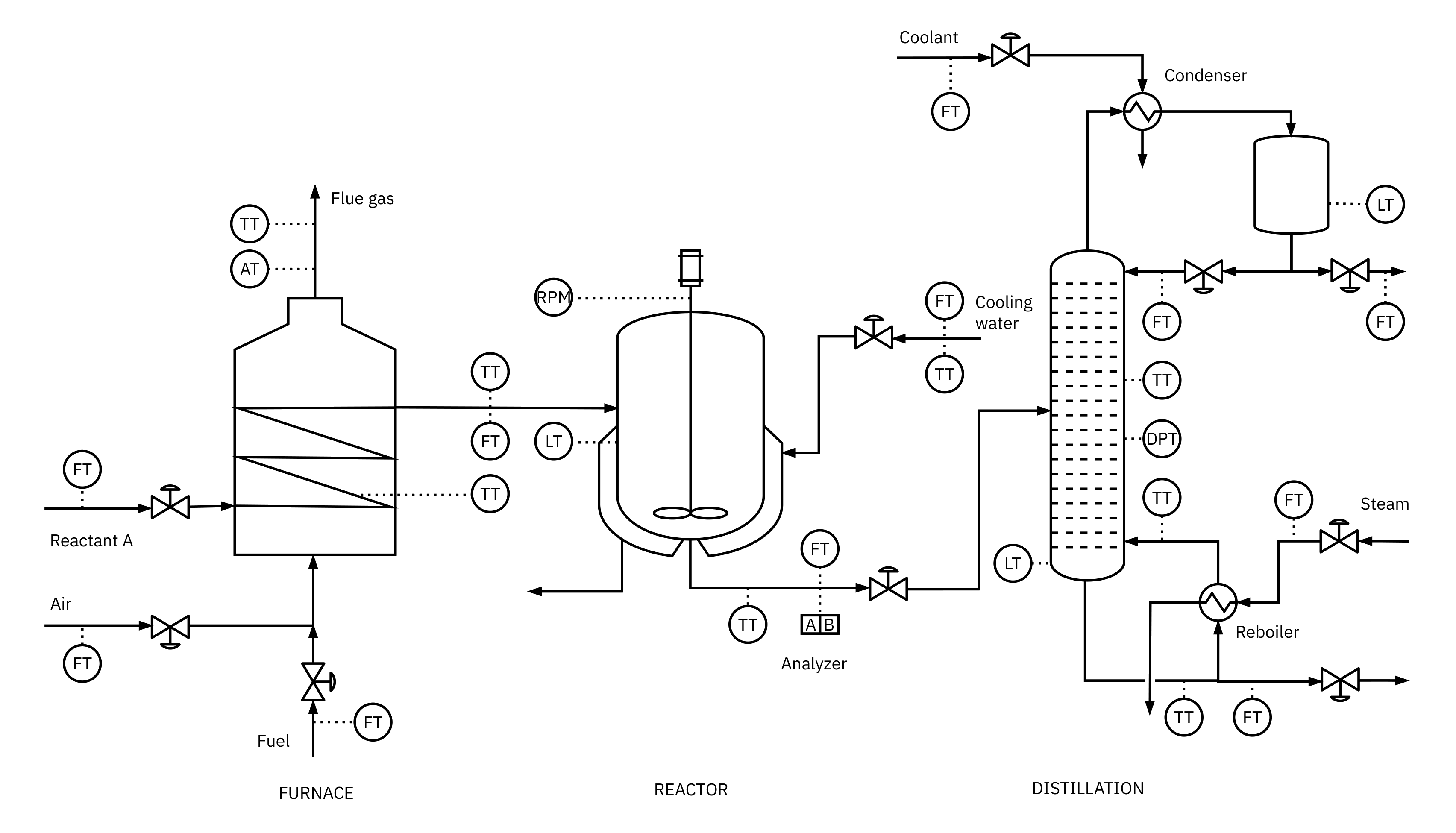
🤔 how many measurements are there?
- Real Process often have more than one input and one outputs.
- Real process has multi-input and multi-output (MIMO)
- Engineers attempt to select a set of controlled variables from a set of measurement.
Plantwide control hierarchy
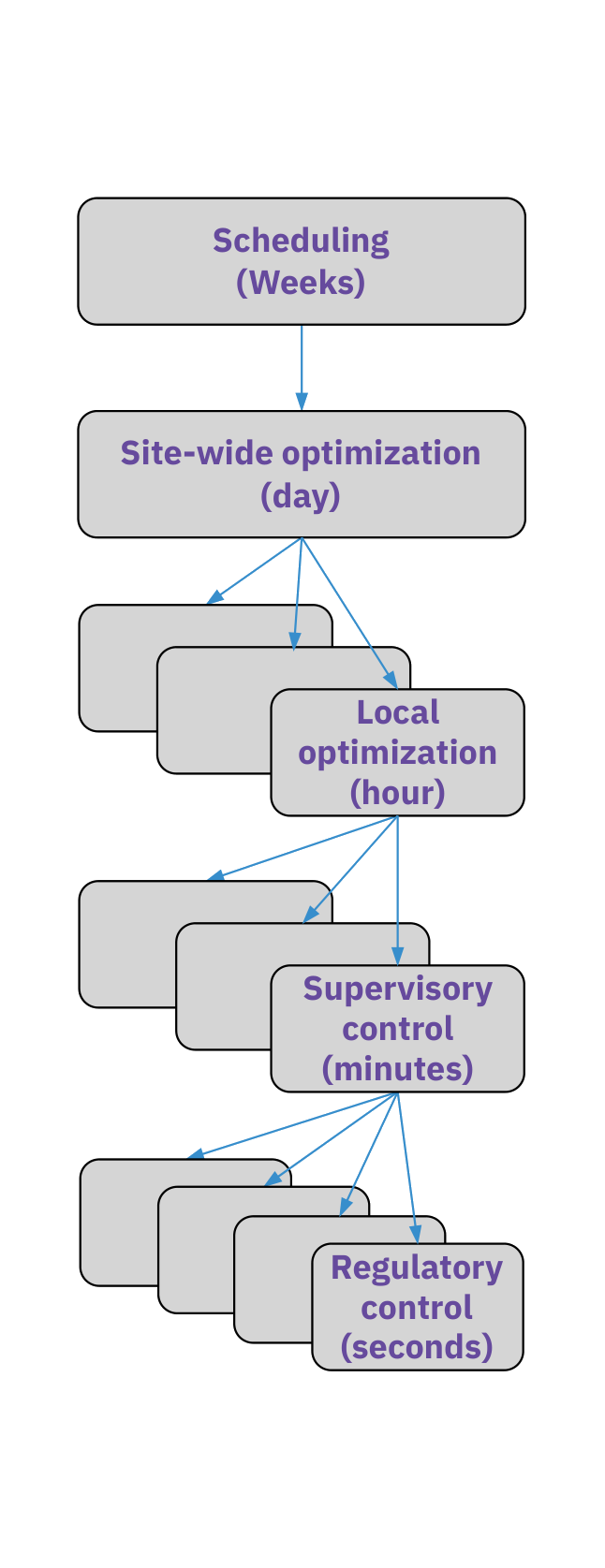
Several layers: regulatory, supervisory, optimization, scheduling.
Regulatory: multi-loop PID controls levels, temperature, flow, pressure. Ensures stability.
Supervisory: sends setpoints to the regulatory layer. May be centralized.
Optimization: real-time monitoring and optimization provide optimal targets for supervision.
Trade-off: plantwide optimization acts slower than local control.
Scheduling: inventory and production planning, often offline.
Use fast regulatory PID loops for stability, and let slower supervisory and optimization layers set plantwide targets and schedules.
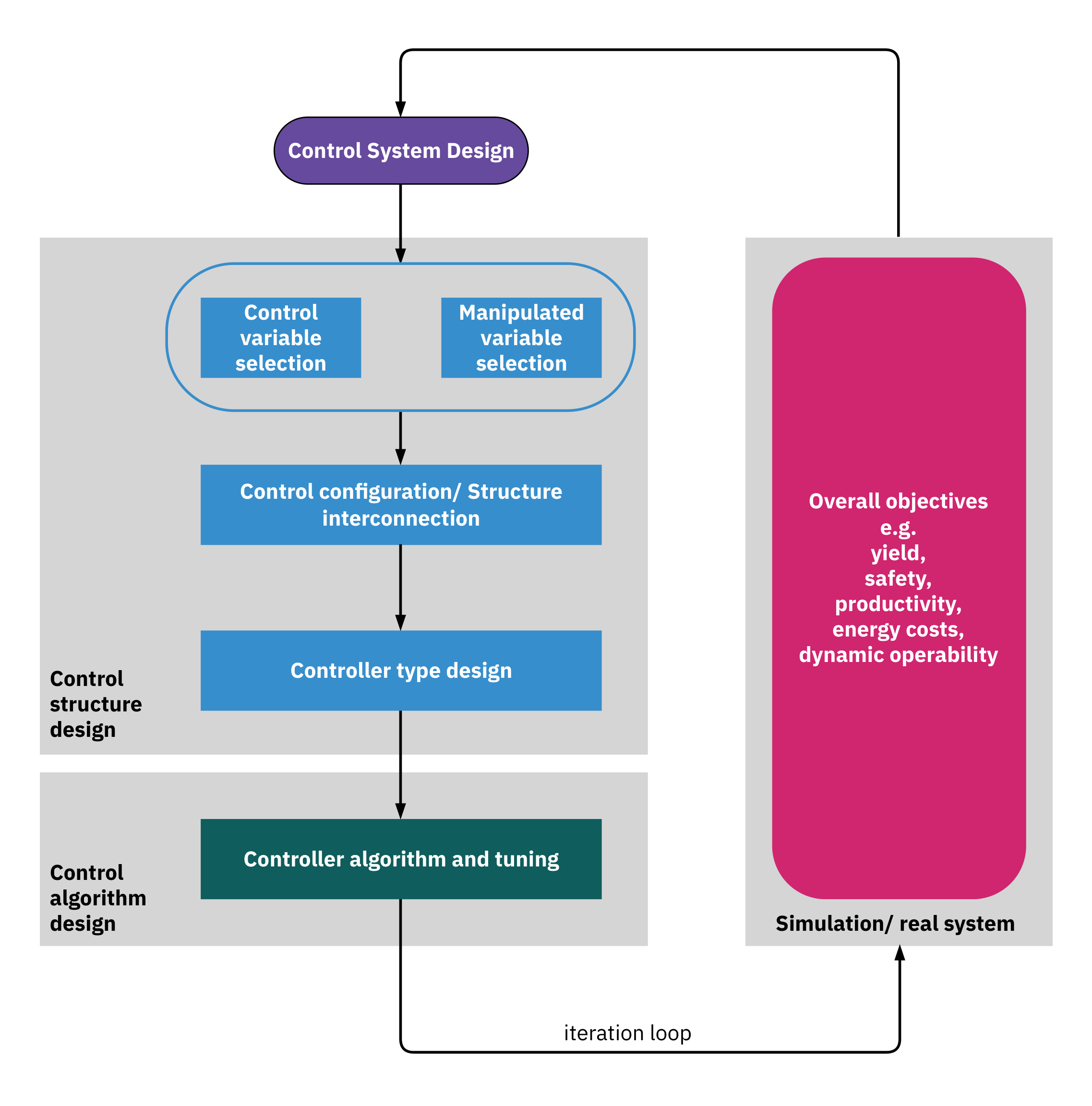
Plantwide control design flowchart
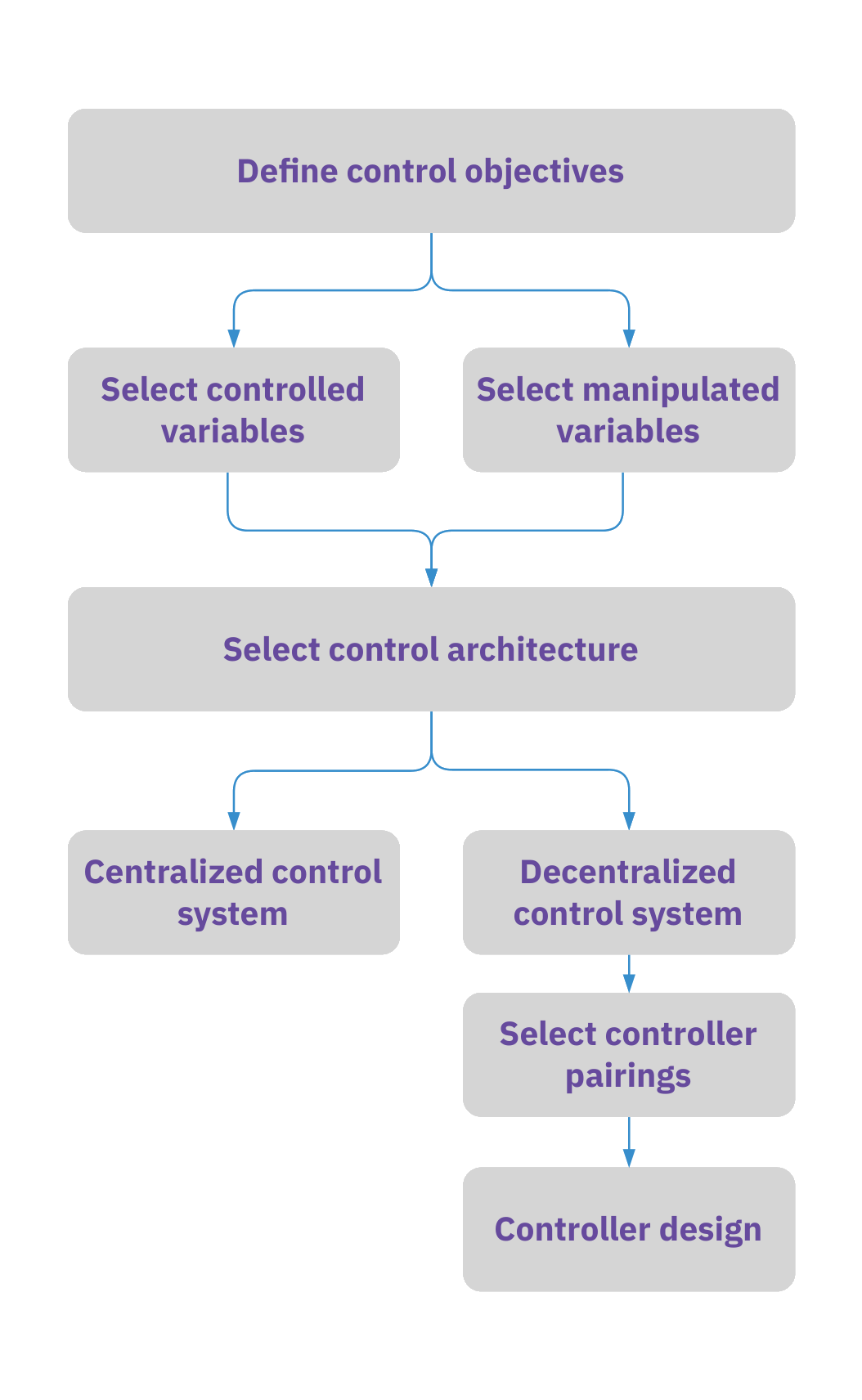
Define control objectives: explicit outcomes and implicit plantwide goals.
Select controlled and manipulated variables that support the explicit objectives and fit the plantwide philosophy.
- directly related to Explicit Control Objectives
- indirectly related to Implicit Control Objectives
Choose the control architecture: centralized or decentralized.
For decentralized (multi-loop PID) systems, decide controller pairings first to manage interactions, then design the controllers.
Plantwide control design tasks
Plantwide control design is iterative
Choose initial controller pairings.
note: different pairings may require redesign of individual controllers.
Design and tune controllers.
Simulate and assess plantwide performance.
Use a full-plant simulation to evaluate the complete design.
If targets are not met, revise pairings and retune.
Repeat until objectives are satisfied.
Validate controller pairings with full-plant simulation; if KPIs fall short, revise pairings and retune until objectives are met.
2x2 MIMO process system
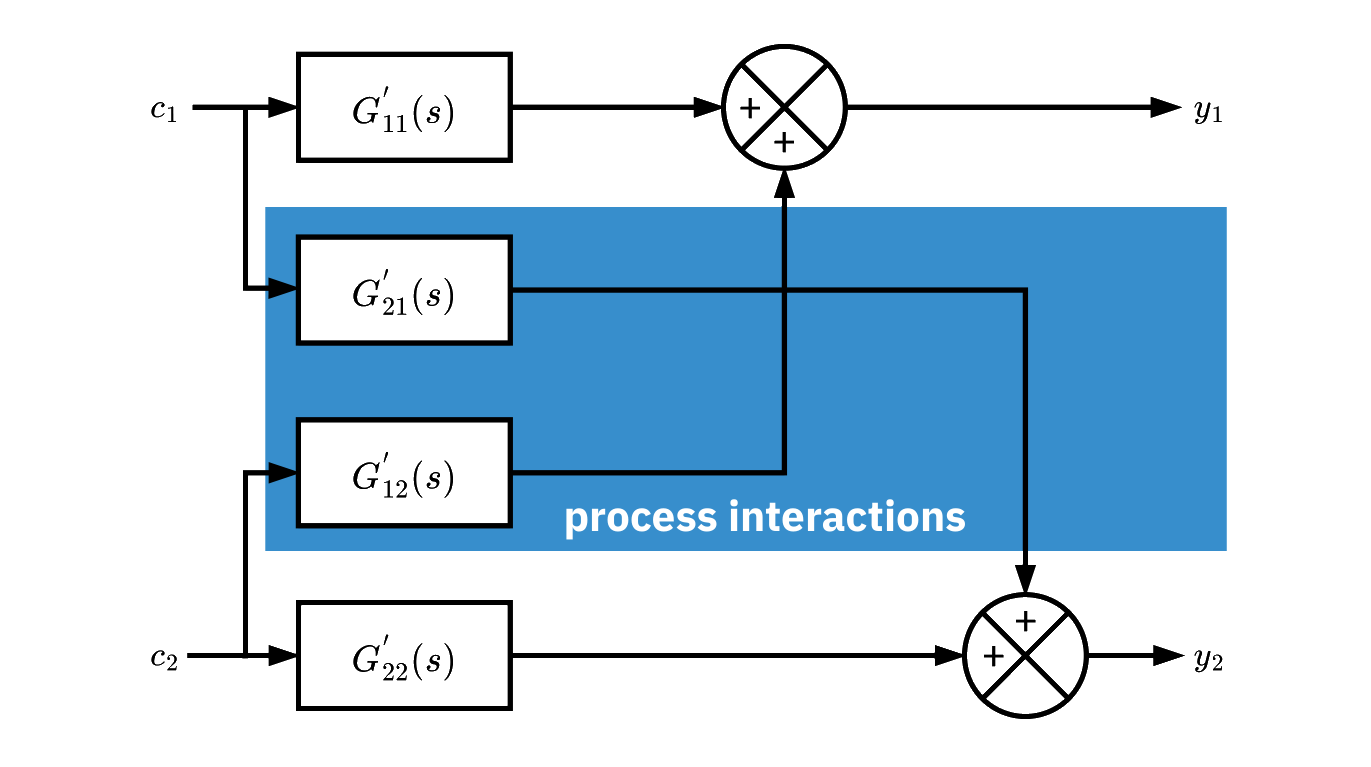
- Inputs: c_1, c_2. Outputs: y_1, y_2.
- Plant ransfer function matrix
\mathbf{G}=\begin{bmatrix} G'_{11} & G'_{12} \\ G'_{21} & G'_{22} \end{bmatrix} - G'_{12} is the transfer from c_2 to y_1.
- Interactions: a change in c_1 or c_2 affects both outputs.
- Cross terms G'_{12} and G'_{21} create loop coupling.
- Interactions can limit decentralized control performance.
Distillation column: 2x2 MIMO example
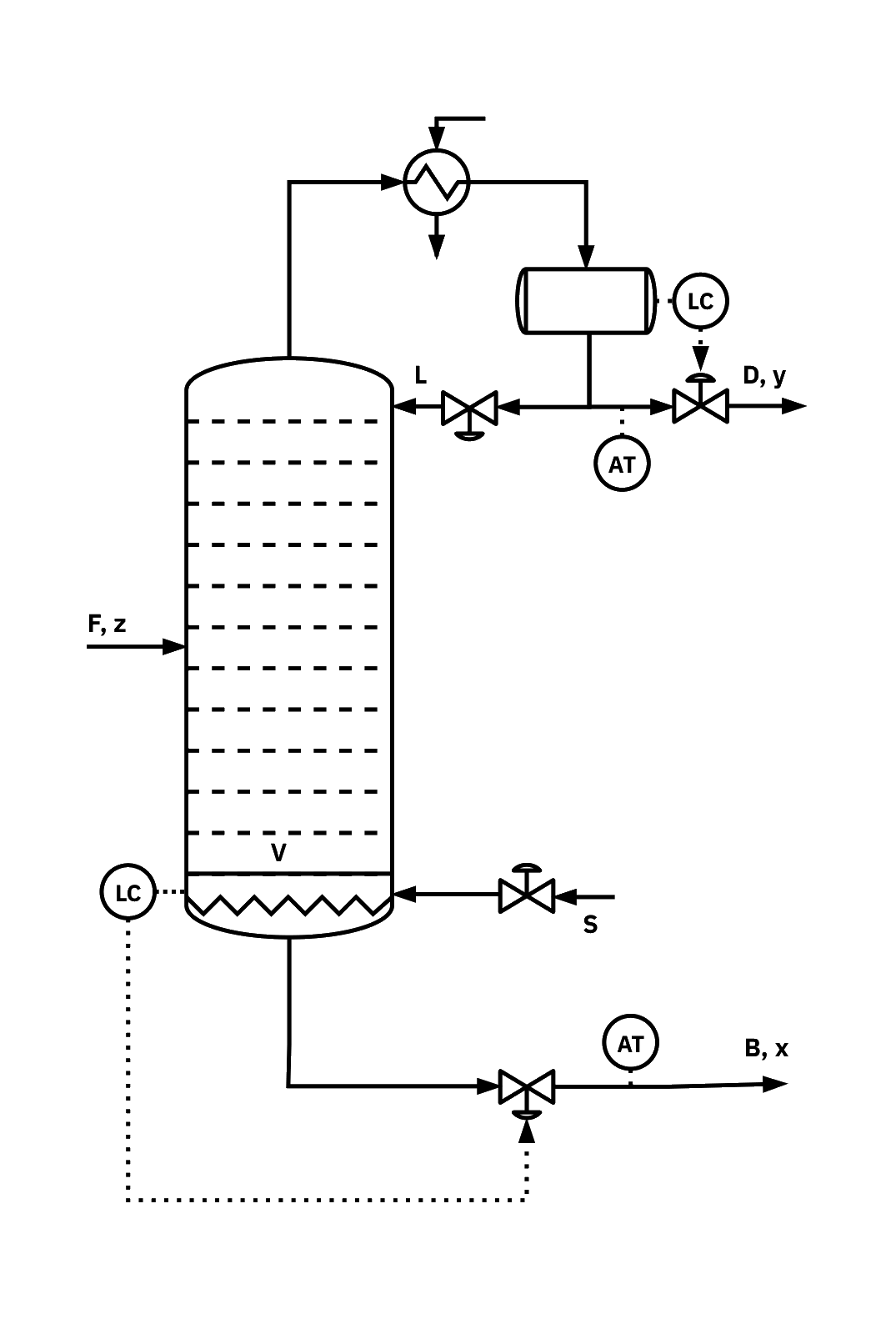
- Two inputs: reflux flow L, steam/boilup S.
- Two outputs: distillate composition y_D, bottoms composition x_B.
- Interactions: changes in L or S affect both y_D and x_B.
- Level loop: weakly coupled to compositions.
- Design focus: composition controllers; choose pairings/decoupling to handle interactions.
multi‐loop controllers (decentralized)
- Two SISO loops, two controllers.
- Independence is only valid when interactions are negligible.
- Cross terms G'_{21} and G'_{12} couple the loops and affect tuning.
- Direct pairings: c_1 \rightarrow y_1, c_2 \rightarrow y_2.
- Indirect pairings: c_1 \rightarrow y_2, c_2 \rightarrow y_1.
- Pairing choice changes interaction severity and overall performance.
Multi‐loop controllers – distillation column
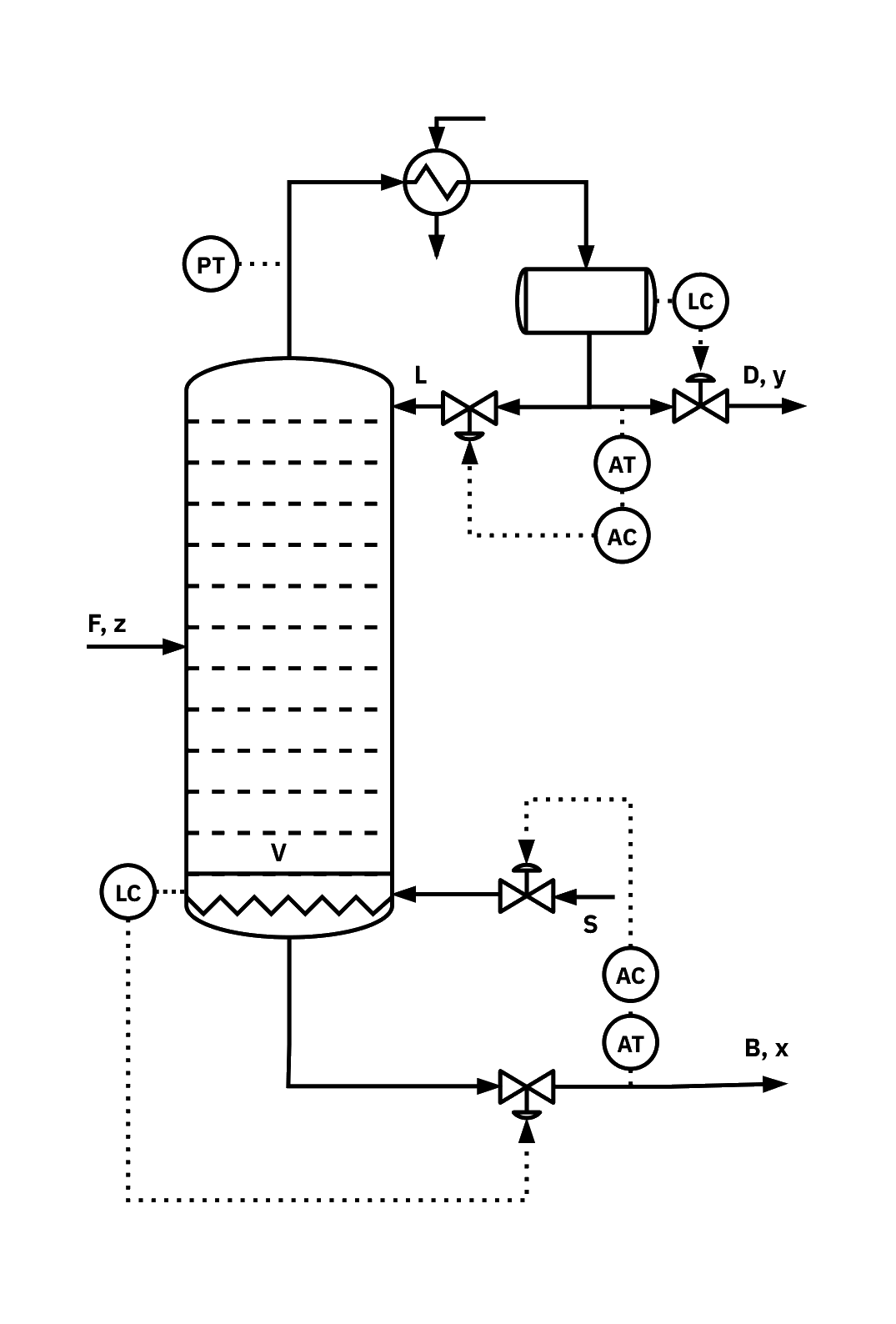
- Reflux flow L controls top composition y_D.
- Steam/boilup S controls bottom composition x_B.
- Bottoms flow B maintains level.
- Top and bottom composition loops are strongly coupled, level loop coupling is weak.
- Select composition pairings to manage interactions. Compare L\!\to\!y_D, S\!\to\!x_B with the swapped pairing using gains, dynamics, and disturbance paths.
🤔
Can we control the top composition using the steam flow, while the bottom composition using the reflux flow? Why ?
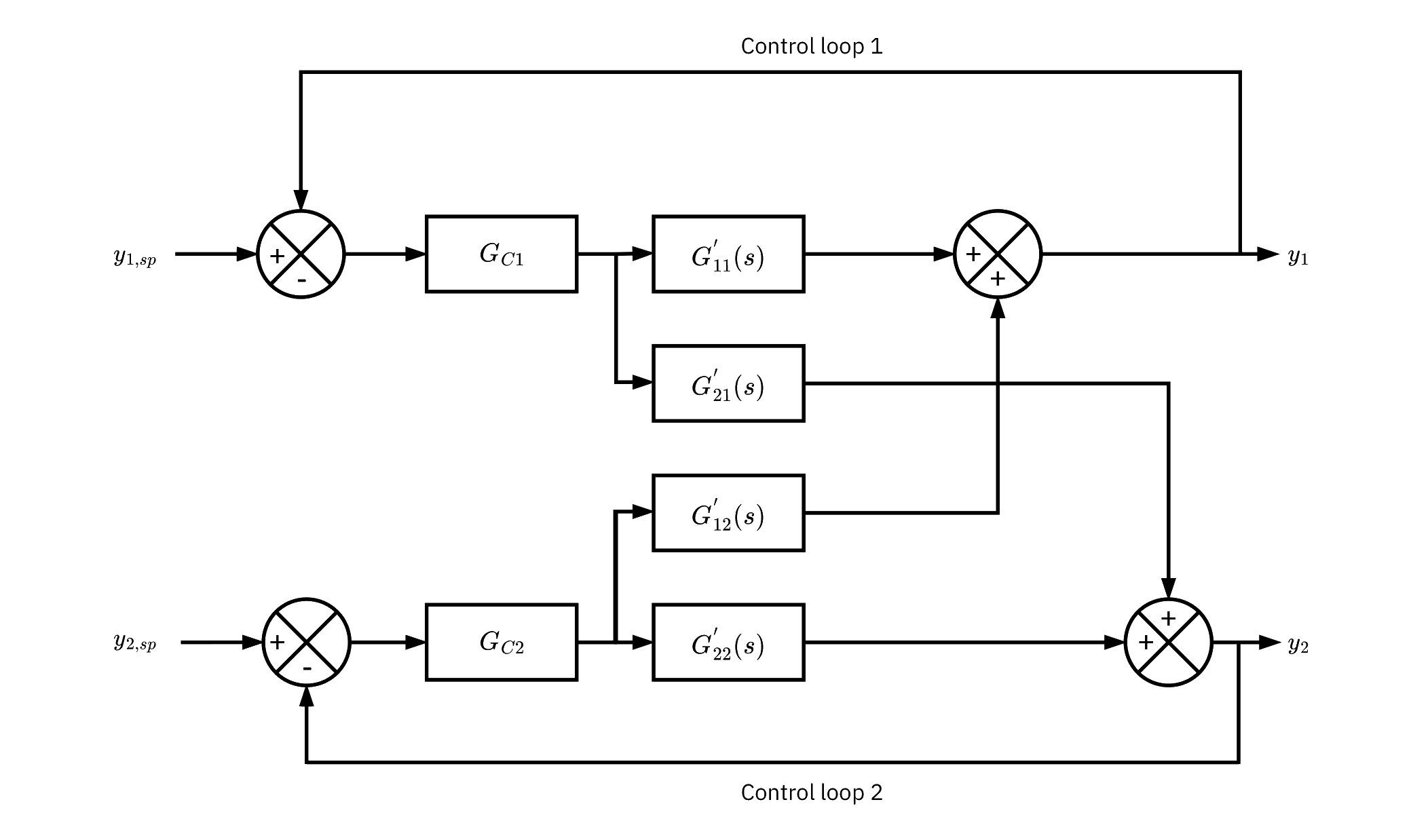
Coupling effect of loop 2 on y_1
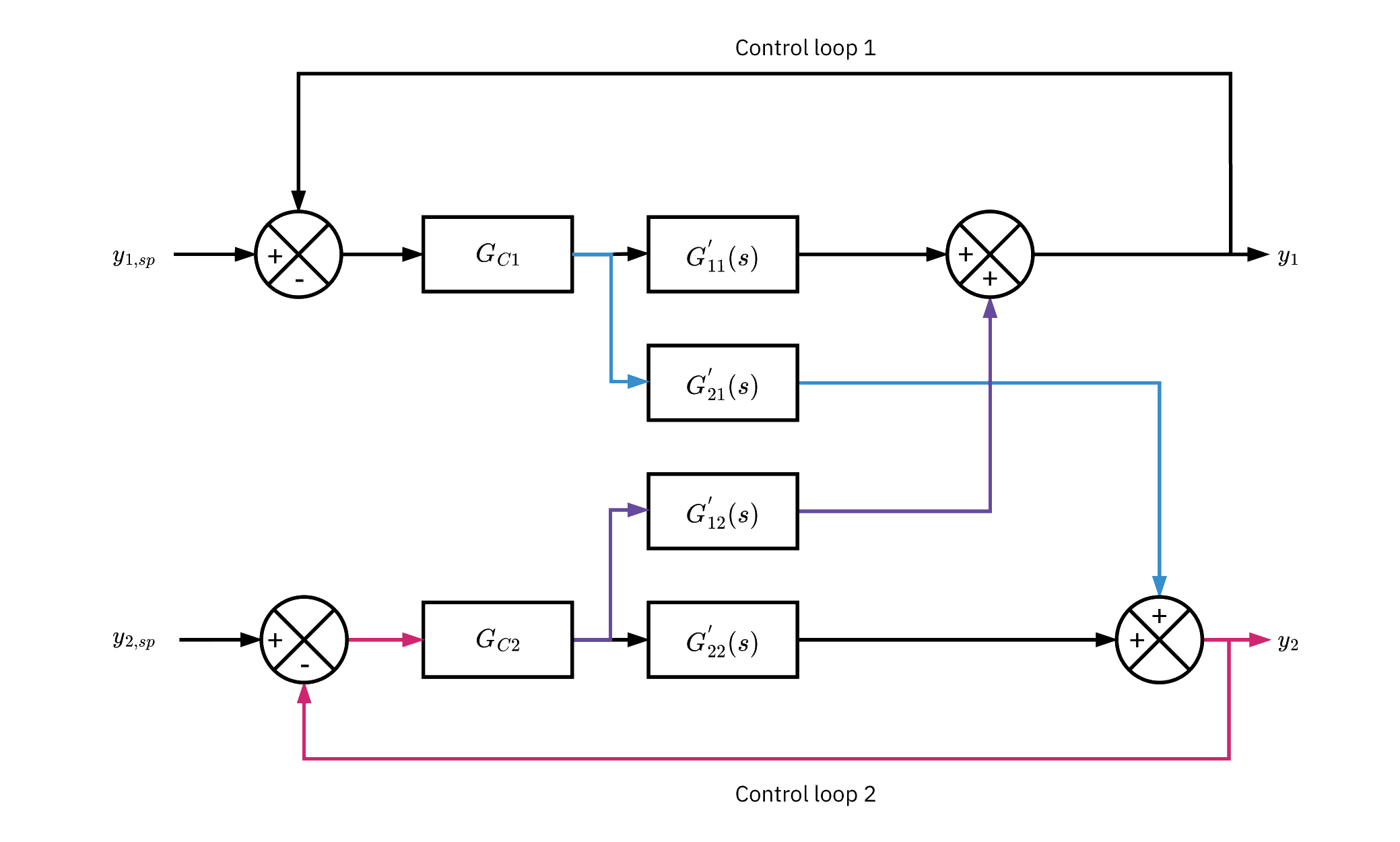
- Change y_{1,\mathrm{sp}} → controller G_{C1} moves c_1.
- c_1 impacts y_1 via G'_{11} and y_2 via G'_{21}.
- y_2 deviates → G_{C2} adjusts c_2.
- c_2 impacts y_2 via G'_{22} and y_1 via G'_{12}.
- Loop 1 reacts again to the cross effect on y_1.
- The loops iterate until y_1 and y_2 settle, if no further setpoint or disturbance changes occur.
Multi‐loop controllers – distillation column
Reflux L holds the distillate composition y_D; changing L also disturbs the bottoms composition x_B.
The bottoms loop reacts: adjust steam/boilup S to bring x_B back to its setpoint.
That change in S disturbs y_D; the reflux loop trims L until y_D returns to setpoint.
Impact of dynamic behavior
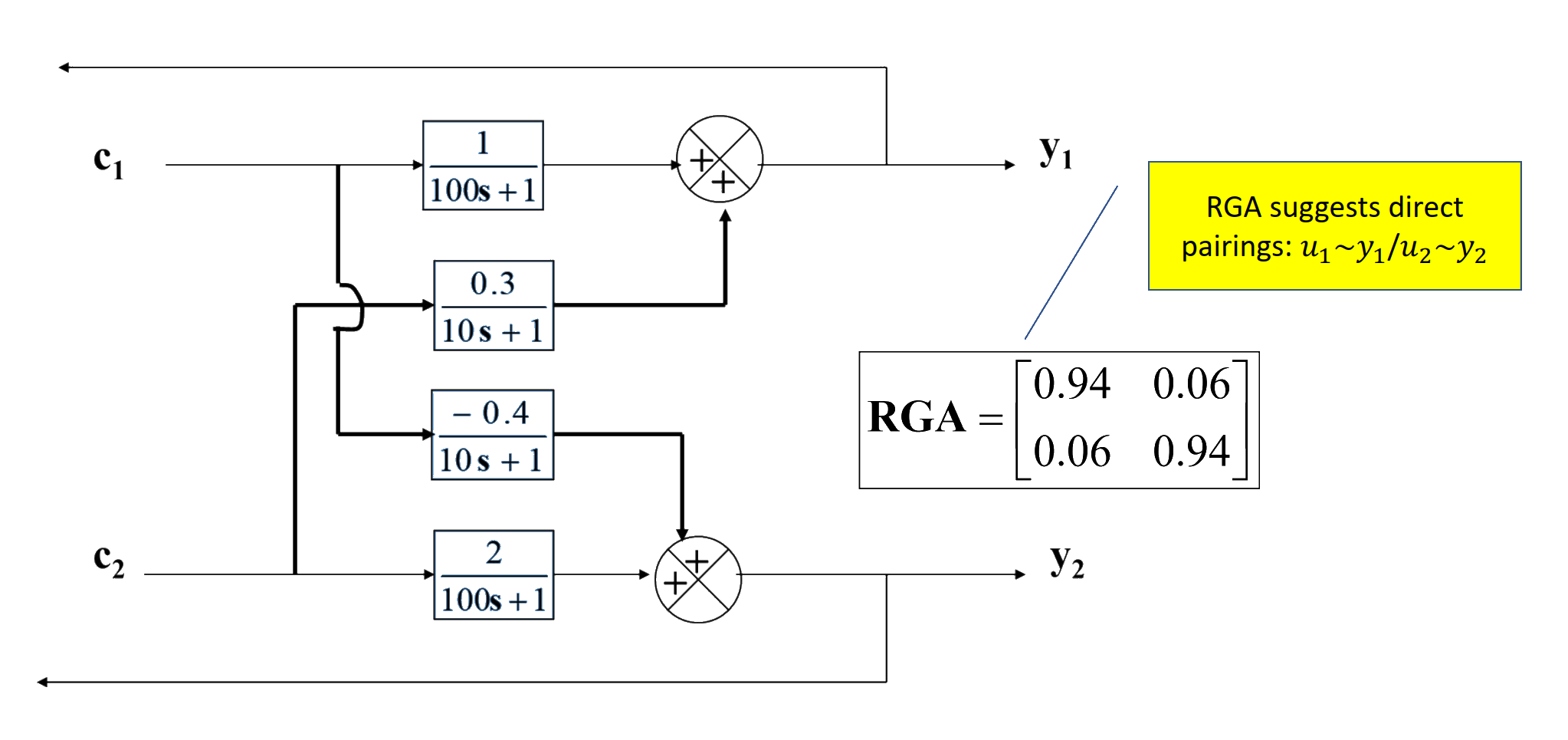
Direct vs reverse pairing
- RGA suggests direct pairings: u_1 \to y_1, u_2 \to y_2.
- But time-domain simulations show reverse pairings outperform direct pairings.
- Dynamic responses of two transfer functions differ (time constants 100 s vs 10 s).
- Steady-state RGA alone may be misleading; dynamic RGA is needed.
Dynamic RGA
When transfer function dynamics differ significantly, steady-state RGA can be misleading.
Dynamic RGA evaluates interaction strength as a function of frequency ω.
Helps identify correct pairings depending on operating frequency range.
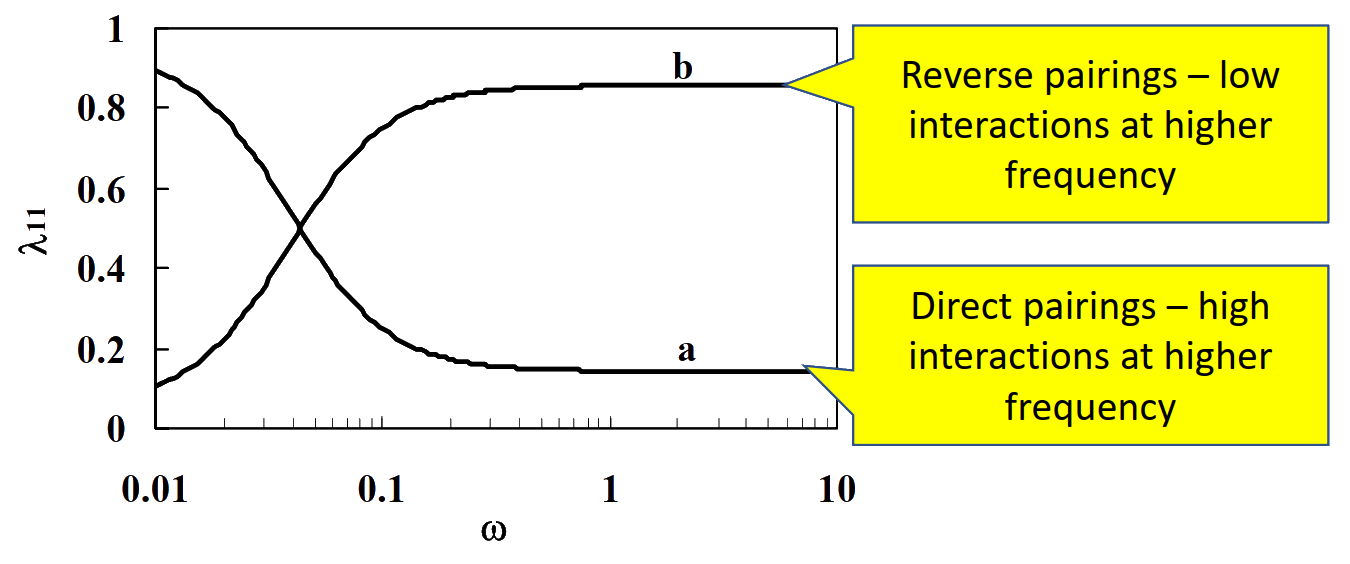
- Mathematical Formulation
\lambda_{11}(\omega) = \frac{1}{ 1 - \frac{|G_{12}(i\omega)||G_{21}(i\omega)|}{|G_{11}(i\omega)||G_{22}(i\omega)|} }
- For a first-order process:
|G(i\omega)| = \frac{K_p}{\sqrt{\tau_p^2 \omega^2 + 1}}
- For the example system:
\lambda_{11}(\omega) = \frac{1}{1 + \frac{16.7(100^2\omega^2 + 1)}{100^2\omega^2 + 1}}
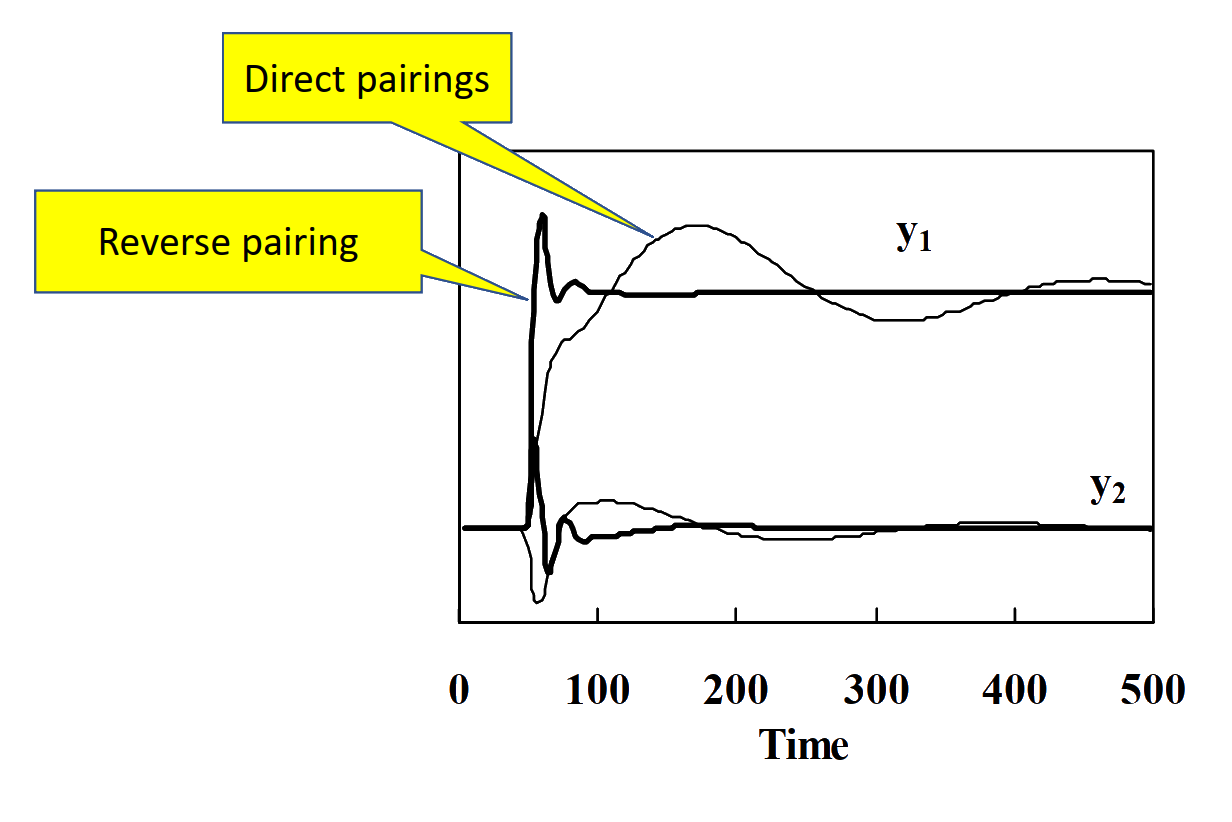
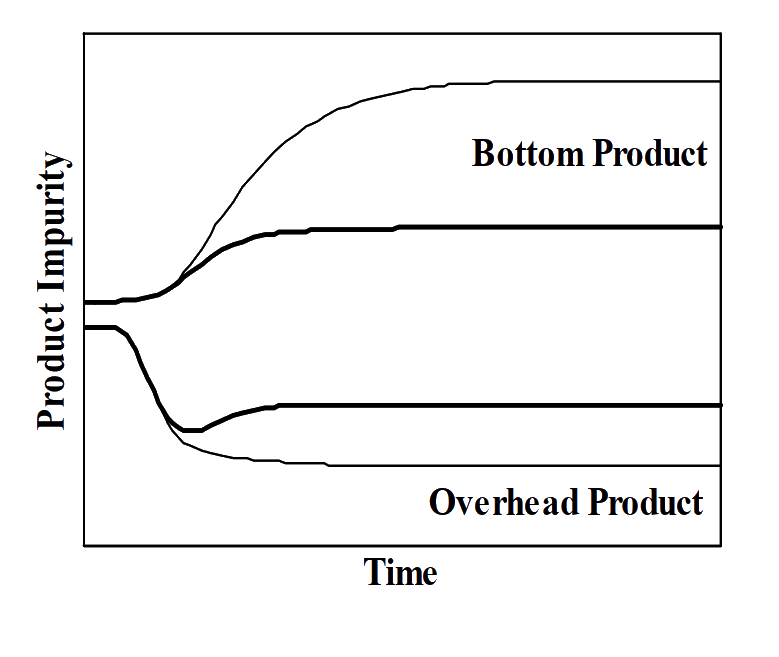
Sensitivity to disturbances
Each configuration has a different sensitivity to a disturbance.
Thick and thin line represent the results of different configurations.
Notice that, the configuration with thick line is less sensitive to disturbance than the one with thin line.
The one that is less sensitive to disturbance is a more efficient configuration (or pairings).
Less sensitive to disturbance is also good because it could lead to lower control action required.
(L,V) configuration applied to the C3 splitter
- Reflux flow L is used to control top composition
- Steam flow S is used to control bottom composition
- Steam flow directly affects vapor flow V in the column → therefore V is used to control the bottom composition
- This arrangement is known as the (L,V) configuration
Reflux ratio applied to the overhead of the C3 splitter
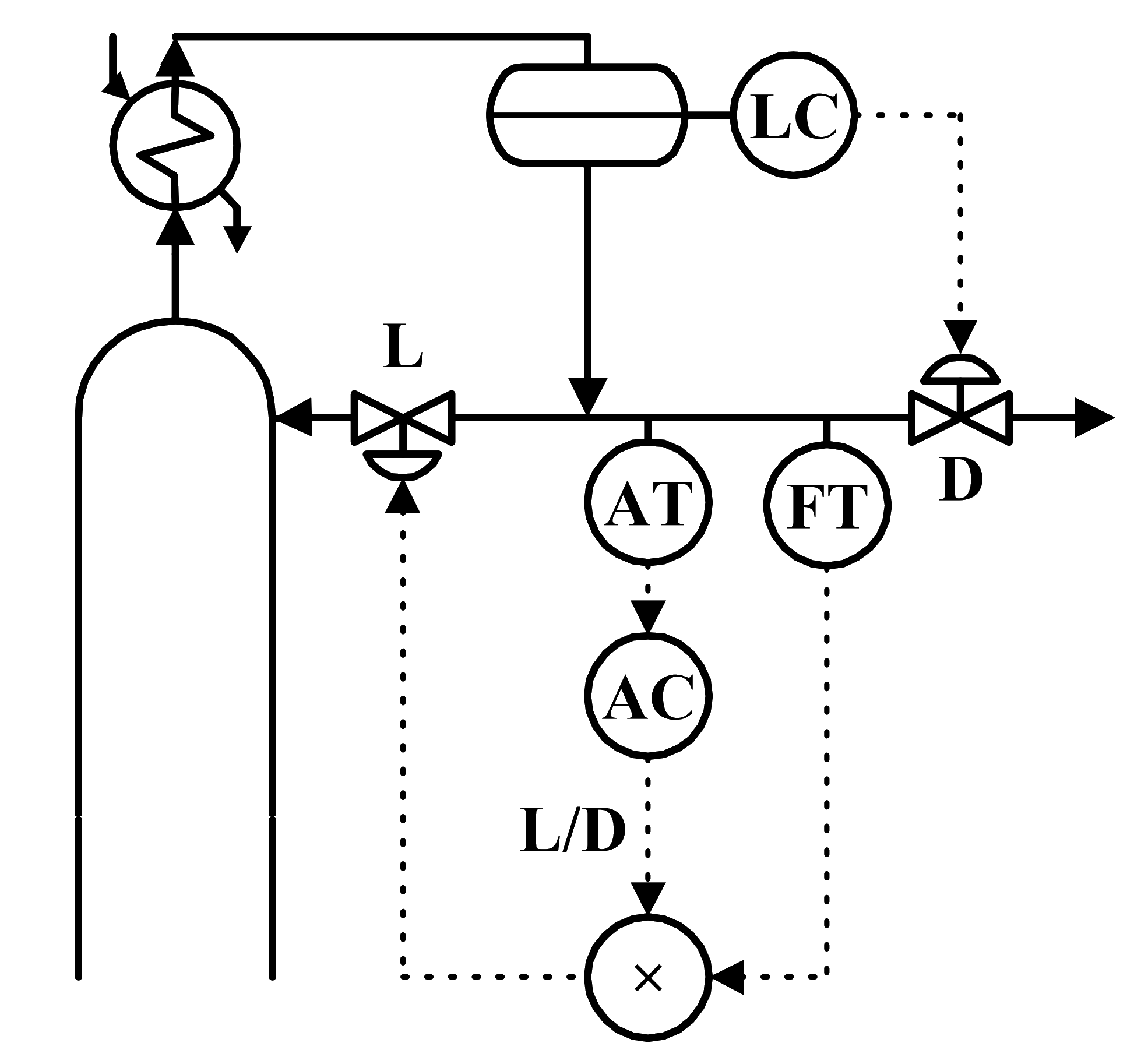
- Ratio controller is used where the wild stream is the distillate flow, while the reflux stream is the manipulated flow
- Thus, reflux ratio (L/D) is used as manipulated variable by the top composition controller
- For the bottom composition controller, the boilup ratio (V/B) can be used as manipulated variable
- Bottom flow B is wild stream
- Steam flow S is the manipulated stream (S is directly related to vapor flow
- Bottom flow B is wild stream
- Thus, this is called the (L/D, V/B) configuration
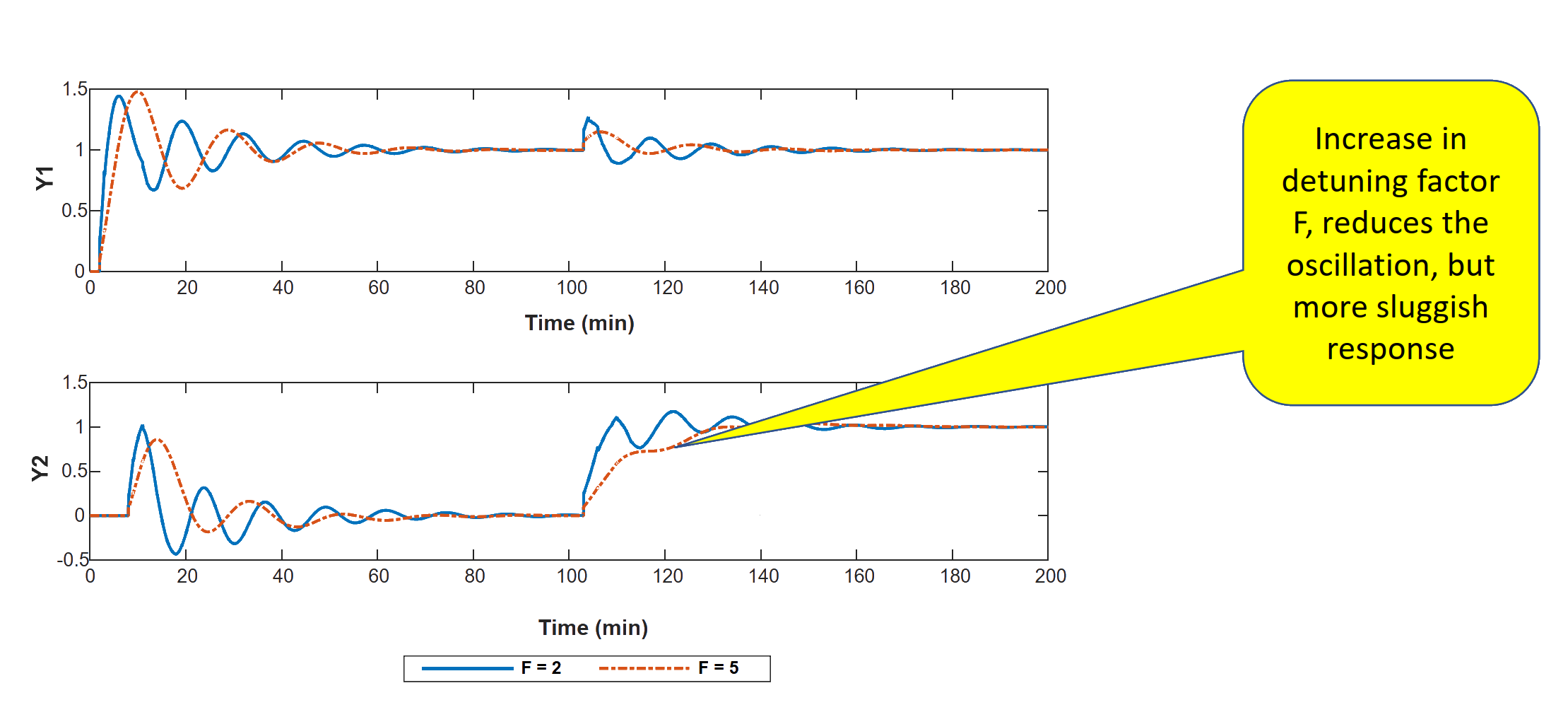
WB column - detuning method
If F = 2
G'_{c1} = 0.6448 \left( 1 + \frac{1}{2s} + 0.4602s \right), \quad G'_{c2} = -0.1274 \left( 1 + \frac{1}{5.6s} + 1.4s \right)If F = 5
G'_{c1} = 0.2579 \left( 1 + \frac{1}{2s} + 0.4602s \right), \quad G'_{c2} = -0.0510 \left( 1 + \frac{1}{5.6s} + 1.4s \right)
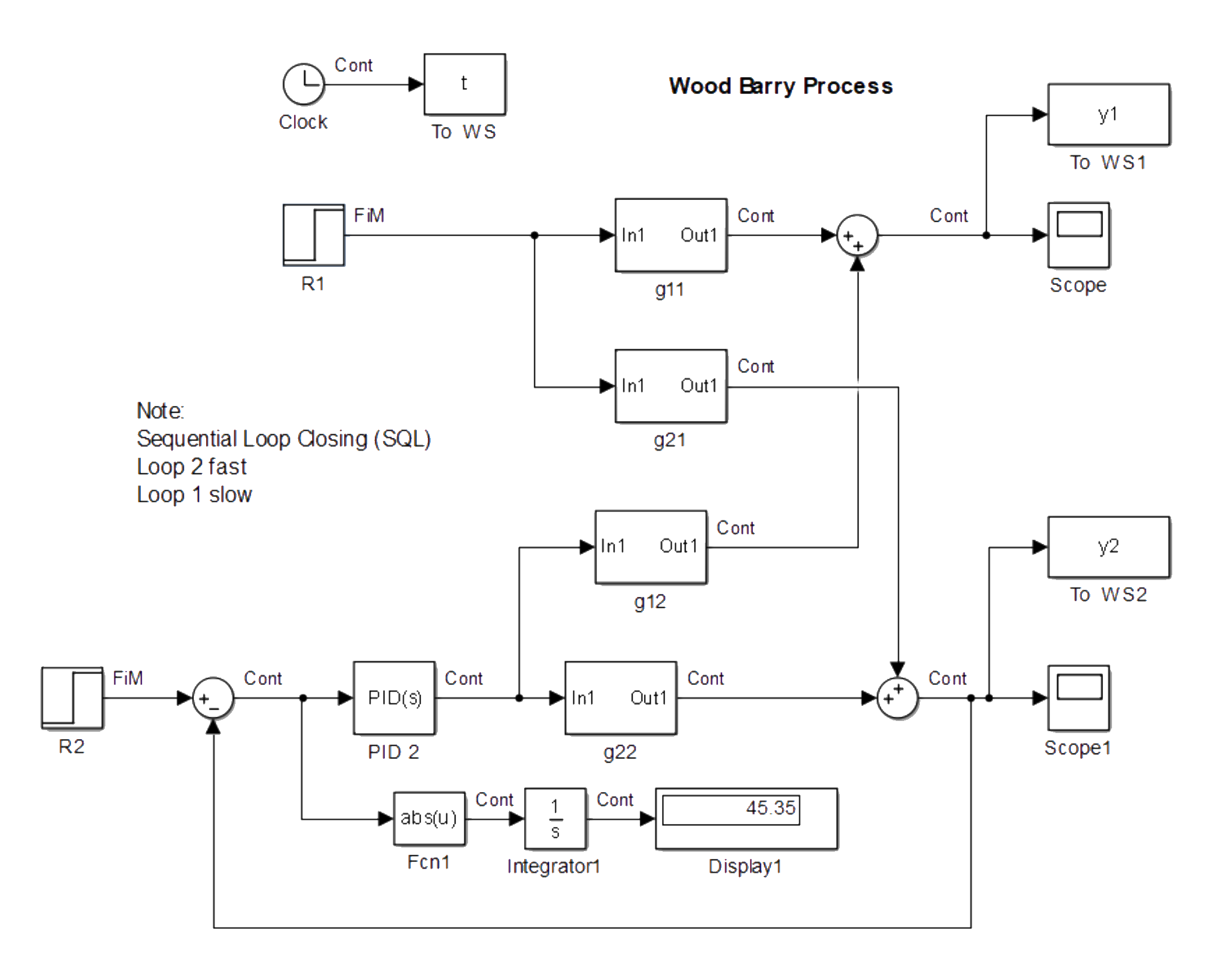
WB column – SQL method
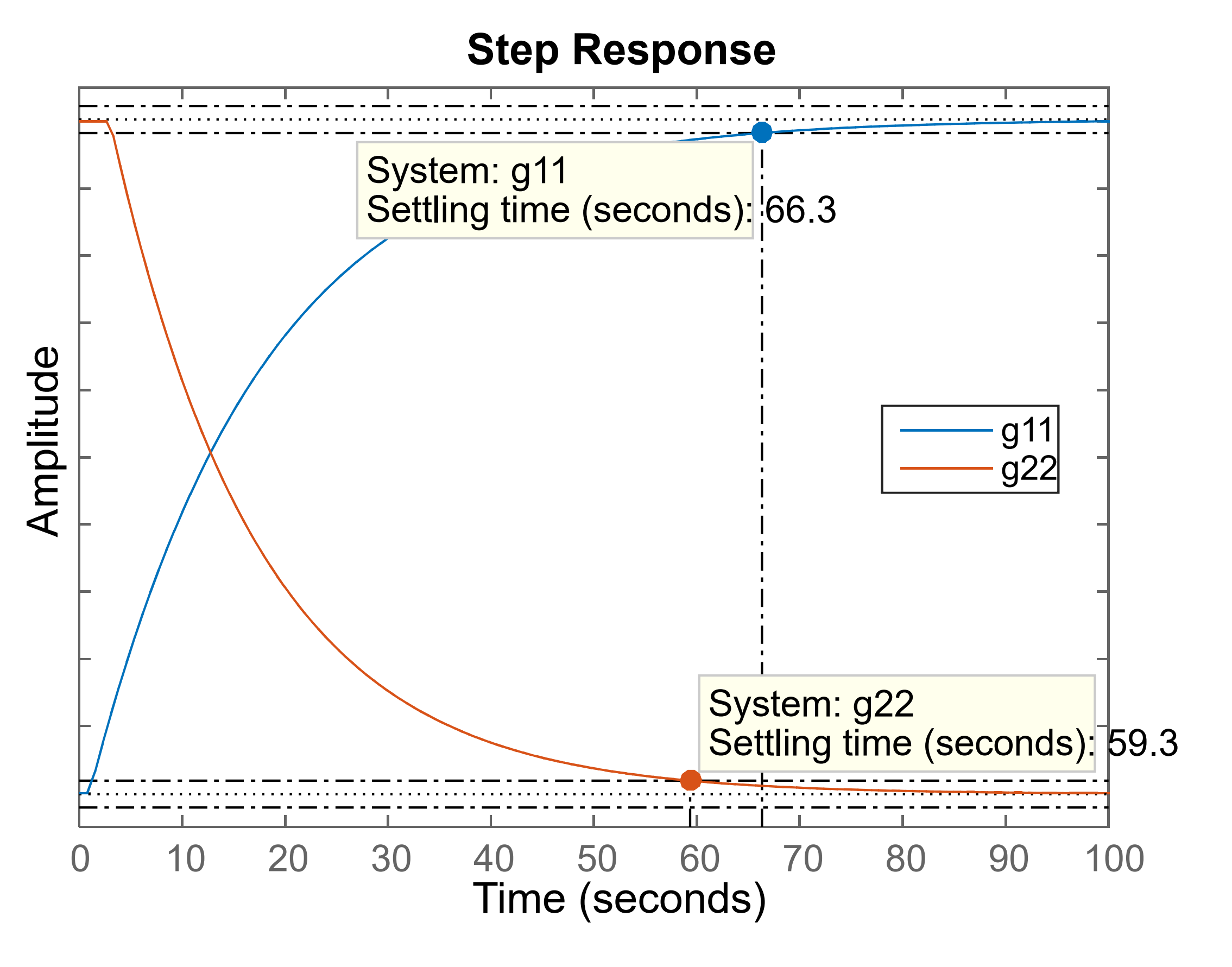
Step 1: Identify which loop is faster by comparing open-loop step responses of g_{11} and g_{22}
Use Matlab commands:
- From the step responses:
- g_{22} has a shorter settling time (59.3 s)
- g_{11} has a longer settling time (66.3 s)
- Therefore, loop 2 is faster than loop 1
- g_{22} has a shorter settling time (59.3 s)
Sequential loop closing example
use skogestad imc (simc) tuning in matlab control system designer
design pid 2 using g_{22}
g_{c2} = -0.1423 \left( 1 + \frac{1}{16.5s} + 1.3636s \right)
gm = 9.71 \, db, \quad pm = 74.8^\circ
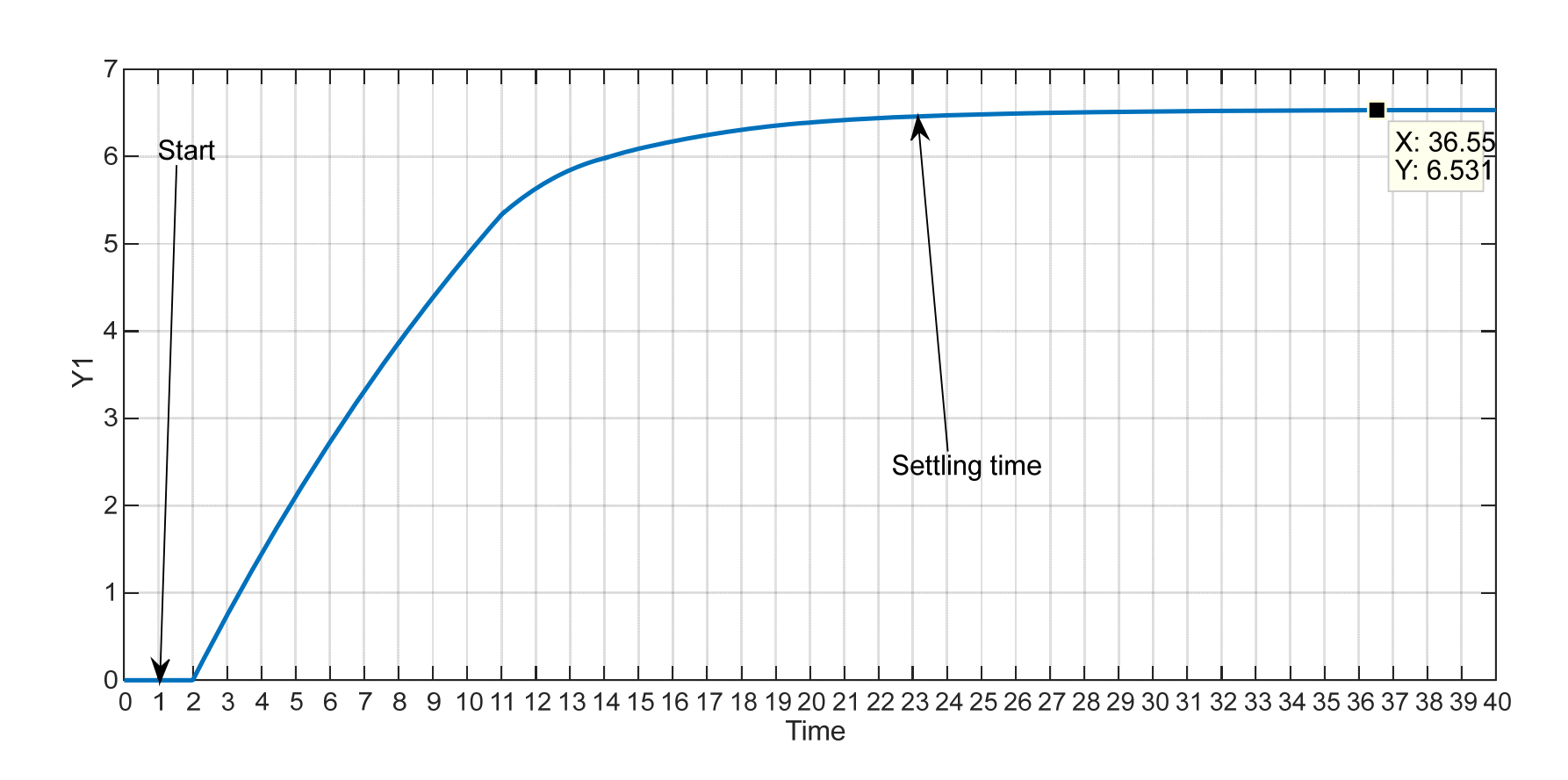
apply a 1-unit step change in r1 and plot t against y1
from this step response, obtain the fopdt parameters (to be used in the next step)
Sequential loop closing example
- from the step response of y_1:
- delay: \theta = 1
- time constant: \tau_p = \dfrac{23 - 2}{4} = 5.25
- gain: k_p = 6.53
- delay: \theta = 1
linearized model for loop 1:
g'_{11} = \frac{6.53 \, e^{-s}}{5.25s + 1}
Sequential loop closing example
design pid 1 using the linearized model g'_{11}
g'_{11} = \frac{6.53 e^{-s}}{5.25s + 1}
g_{c1} = 0.4405 \left( 1 + \frac{1}{5.7s} + 0.456s \right)
gm = 9.92 \, db, \quad pm = 74.6^\circ
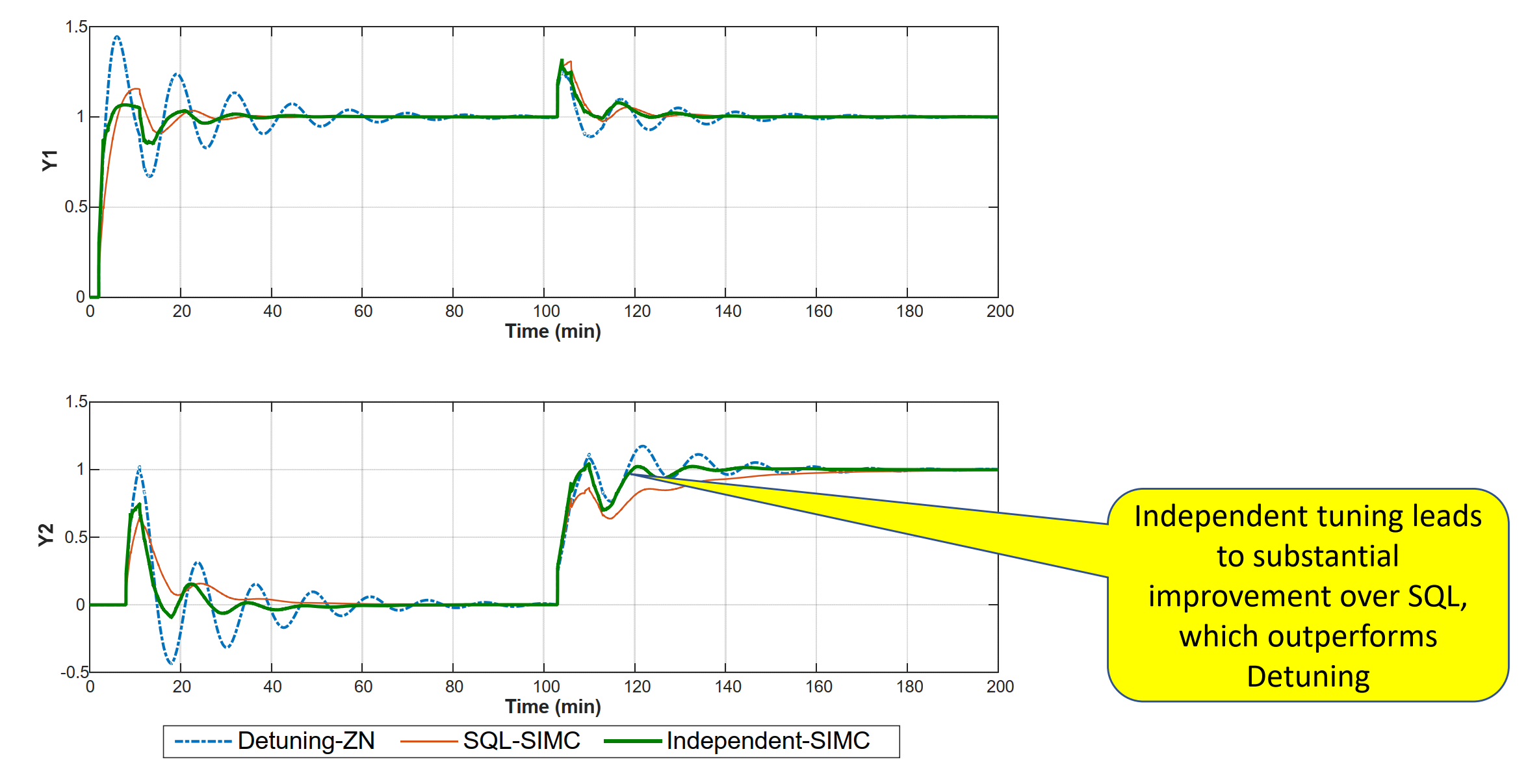
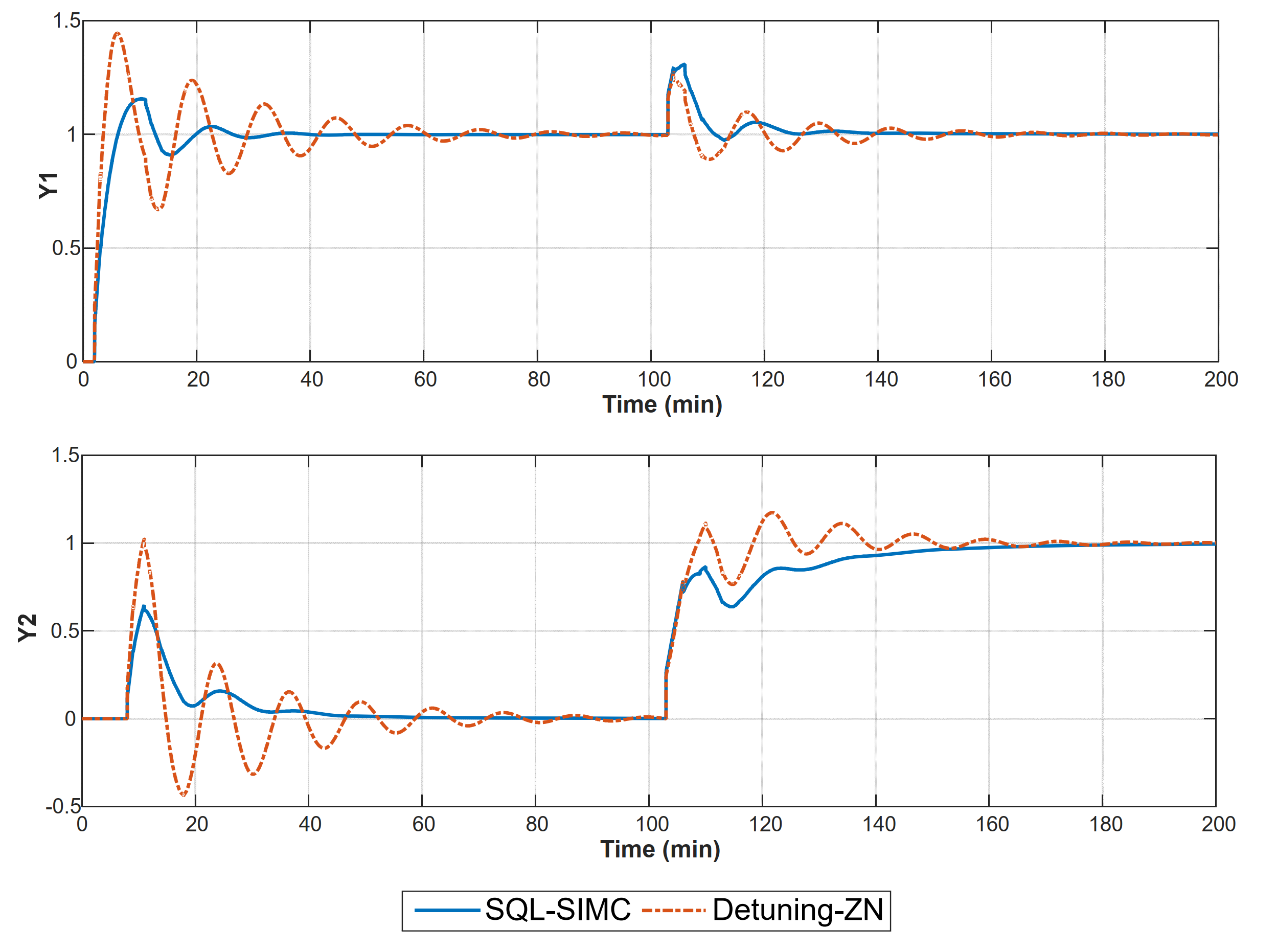
the plots show comparison between sql tuning and the previous detuning method
sql demonstrates substantial improvement in closed-loop performance compared to detuning
Multi‐loop pid controllers for WB column – independent tuning method