
Time series Modelling and analysis
Advanced Modeling and Control
Outline
- Introduction & Motivation
- Basics of Time Series
- Transfer Function Models
- Autoregressive (AR) Models
- ARX Models
- ARMAX Models
- ARMA/ARIMA Models
- Model Evaluation & Selection
- Summary & Reflection
What is Time Series?
- A time series is a sequence of observations recorded at successive points in time
- Each observation is ordered, meaning the position in time matters
- Data is often collected at regular intervals:
- Seconds, minutes, hours (process monitoring sensors)
- Days, months, years (economic, environmental, health data)
- Seconds, minutes, hours (process monitoring sensors)
Importance
- Provides patterns and forecasts to support decisions
- Anticipates specification violations in process industries
- Typical applications:
- Process control
- Energy demand forecasting
- Equipment health monitoring
- Economic and financial trends
- Climate and agriculture planning
- Public health surveillance
Stationary vs Non-stationary
Stationary series
- Mean and variance constant over time
- Fluctuates around a stable level
- Easier to model and forecast
Non-stationary series
- Mean or variance changes with time
- Shows trend, seasonality, or shifts
- Requires differencing or detrending

Time Series Representation
- Time series often large and high-dimensional
- Representation helps simplify analysis and comparison
- Common approaches:
- Raw series (original data)
- Resampling (reducing data points, e.g., daily → monthly)
- Transformation (Fourier, wavelets, PCA)
- Symbolic representation (grouping values into categories)
- Raw series (original data)
Benefits
- Reduces dimensionality while preserving essential patterns
- Enables efficient similarity search and clustering
- Provides basis for further tasks:
- Pattern discovery, Classification, Forecasting




Similarity Measures
- Used to compare two or more time series
- Important for:
- Clustering and classification
- Pattern discovery
- Anomaly detection
- Common measures:
- Euclidean distance
- Correlation-based distance
- Dynamic Time Warping (DTW) for misaligned series
- Euclidean distance

- Euclidean distance works if sequences are aligned
- DTW allows matching when sequences are stretched or shifted
- Correlation-based measures capture shape similarity
- Choice of similarity measure affects clustering, anomaly detection, and forecasting
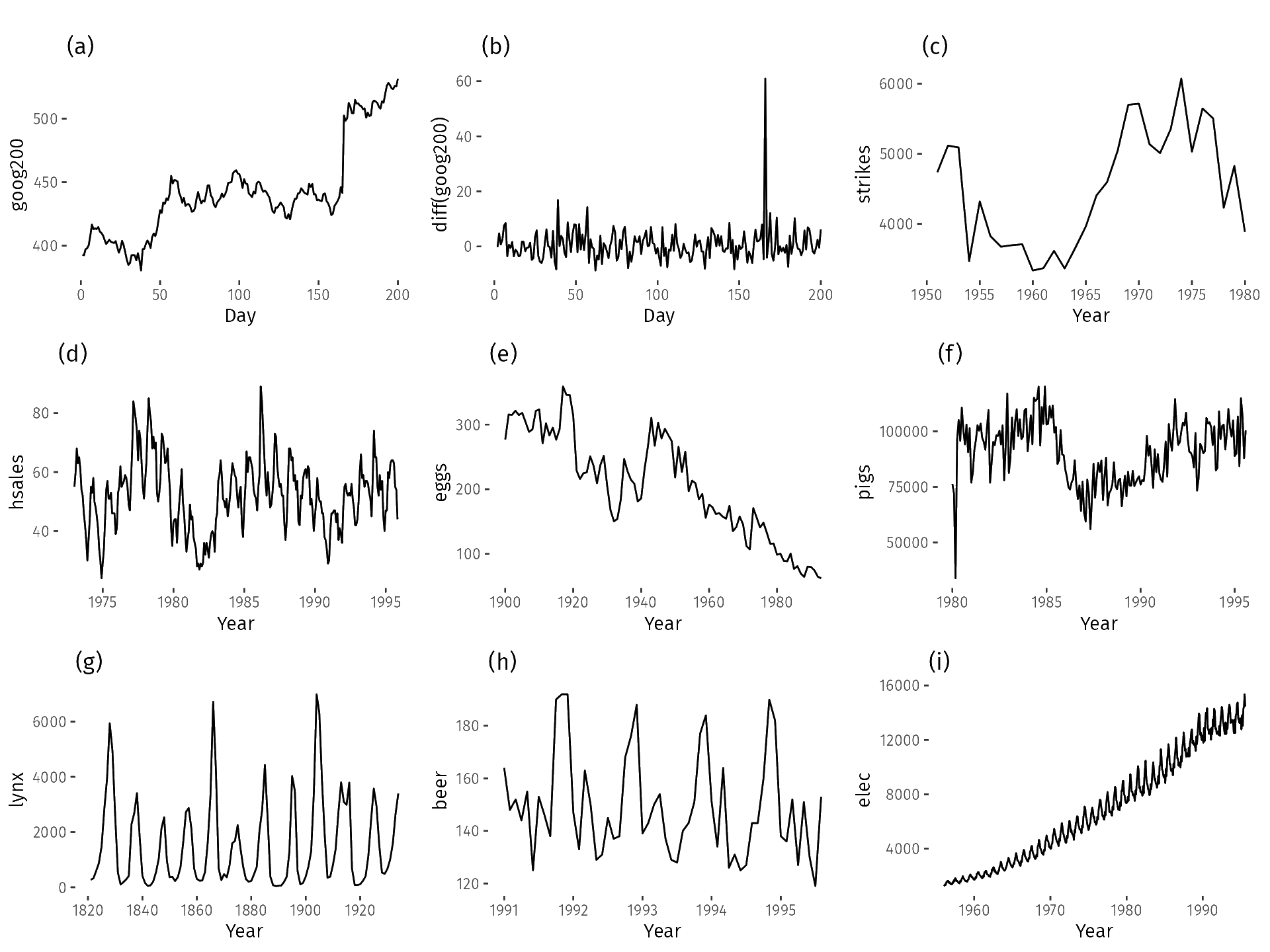
Characteristics of Time Series
- Temporal dependence: current values often depend on past values
- Directionality: useful for forecasting forward in time
- Patterns may include:
- Trend (long-term increase or decrease)
- Seasonality (repeated cycles, e.g., daily, monthly, yearly)
- Random fluctuations (noise)
- Trend (long-term increase or decrease)
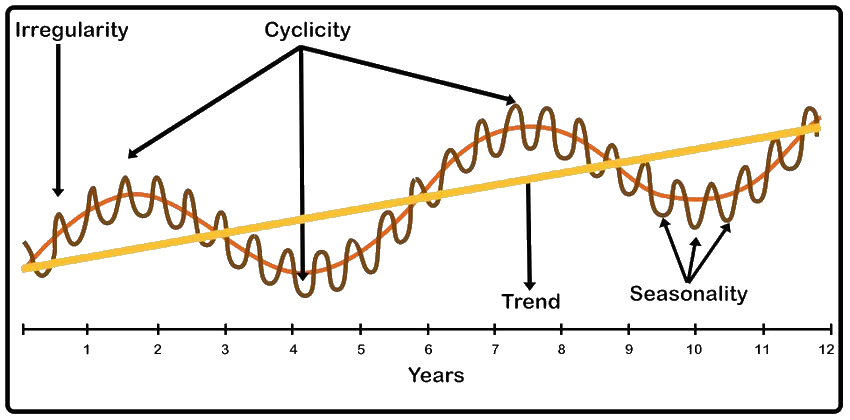
Time-Series Decomposition
- A time series can be expressed as the sum of underlying components
- Trend: long-term direction
- Seasonality: repeating cycles
- Cyclic variation: slower, irregular fluctuations
- Residual: noise or unexpected shocks
- Trend: long-term direction





Mining in Time Series
- Goal: discover hidden information or patterns
- Common tasks:
- Pattern discovery and clustering
- Classification (e.g., healthy vs faulty sensor data)
- Rule discovery (if X happens, Y follows)
- Summarization and anomaly detection
- Pattern discovery and clustering
These tasks often rely on similarity measures, representation, and decomposition.
What Do We Mean by Modelling?
- A model is a simplified description used to explain and predict data
- Two perspectives:
- Structural: parameters have physical meaning (equation / transfer function)
- Data-driven: parameters capture patterns (e.g., neural network)
- Structural: parameters have physical meaning (equation / transfer function)
- What models enable: simulation, forecasting, pattern recognition
Structural vs Data-Driven Models
Structural models
- Based on physical laws and first principles
- Parameters have physical interpretation
- Examples:
- Transfer functions
- Differential equations
- Transfer functions
Pros: interpretability, extrapolation
Cons: need detailed knowledge
Data-driven models
- Based on observed data patterns
- Parameters capture correlations, not physics
- Examples:
- AR, ARX, ARMAX
- Neural networks
- AR, ARX, ARMAX
Pros: flexible, captures complex patterns
Cons: less interpretable, may overfit
Transfer Function Models
- Many physical processes can be represented by transfer functions in the Laplace domain
- Transfer function relates input → output dynamics
- Useful for:
- Capturing process gain, time constant, and delay
- Providing a baseline for time-series model comparison
- Often estimated from input–output data (system identification)

Transfer Functions as a Starting Point
- Physics-based intuition: order, delay, stability
- Provides initial guess for data-driven models (ARX, ARMAX)
- Bridges between first-principles modeling and time-series modeling
Autoregressive (AR) Models
- Concept
- Current value depends on a linear combination of past values
- AR(p):
yt=ϕ1yt−1+ϕ2yt−2+⋯+ϕpyt−p+et - Captures short-term correlations in stationary data
- Current value depends on a linear combination of past values
- MATLAB
ar(data, order)estimates AR model
- Order selection via AIC / FPE
- Applications
- Forecasting short horizon
- Identifying dominant lags
- Noise modeling in ARMAX
- Forecasting short horizon

Autoregressive (AR) Models
Present value depends on past values in discrete time
General AR(n):
yt=c+i=1∑nαiyt−i+εt
- Where: c: constant; αi: AR coefficients; n: model order; εt: white noise
Example for AR(2):
yt=c+α1yt−1+α2yt−2+εt
Properties of AR models
- Short-term memory, good for capturing autocorrelation
- Flexible building block for ARX, ARMAX, ARIMA
AR model with backshift operator z−k
AR(2) in operator notation:
yt=c+α1yt−1+α2yt−2+εt
can be written as
(1+α1z−1+α2z−2)yt=c+εt
yt=1+α1z−1+α2z−2c+εt=A(z)c+εt
Interpretation
The AR model acts like a filter that takes in random noise and produces the series.
The filter has only poles (all-pole system), so the effect of a shock gradually fades but never ends completely (infinite impulse response, IIR).
In contrast, some models have responses that die out completely after a fixed time (finite impulse response, FIR).
In-class Activity 2
Fit an AR model to Australia COVID-19 infection data (Australia_covid_cases.xlsx) and evaluate order selection.
ARX Models
ARX: Autoregressive with Exogenous Input
Exogenous Input
- Many processes are driven by outside factors (inputs, e.g. manipulated variables, disturbances)
- In a distillation column, the feed composition or coolant flow are exogenous inputs that affect the impurity (output).
- In finance, the interest rate might be an exogenous input affecting stock prices.
👉 Exogenous input = something external you can measure and that drives the system.
- Many processes are driven by outside factors (inputs, e.g. manipulated variables, disturbances)
Why ARX?
- AR models only use past outputs → good for forecasting trends
- ARX extends AR by including the exogenous inputs explicitly
- AR models only use past outputs → good for forecasting trends
ARX Model
Structure
A(q−1)y(t)=B(q−1)u(t−nk)+e(t) - A(q−1): polynomial in past outputs
- B(q−1): polynomial in past inputs
- nk: input delay
- e(t): noise
- Interpretation
- Captures cause–effect between input and output
- Useful for system identification with I/O data
- Captures cause–effect between input and output
MATLAB
m = arx(data, [na nb nk])
where na = AR order, nb = input order, nk = input delay.
ARMA Models
- ARMA: Autoregressive Moving Average
- AR models capture dependence on past outputs
- But sometimes random shocks persist for several steps (noise is not white)
- ARMA = AR + MA, adds a moving average (MA) term for noise
- AR models capture dependence on past outputs
Structure
A(q−1)y(t)=C(q−1)e(t) - A(q−1): polynomial in past outputs
- C(q−1): polynomial in past noise (MA part); e(t): white noise
- Interpretation
- Models a stationary time series without external input
- Captures both memory in outputs and persistence in shocks
- Building block for ARIMA models (to handle non-stationarity)
- Models a stationary time series without external input
MATLAB
m = arima(p,0,q)
where p = AR order, q = MA order.
Use estimate(m, data) to fit.
ARMAX Models
- ARMAX: Autoregressive Moving Average with Exogenous Input
- ARX models assume the disturbance is white noise
- In practice, noise often has its own dynamics (colored noise)
- ARMAX extends ARX by adding a moving average (MA) term for noise
- ARX models assume the disturbance is white noise
Structure
A(q−1)y(t)=B(q−1)u(t−nk)+C(q−1)e(t) - A(q−1): past outputs; B(q−1): past inputs (exogenous input)
- C(q−1): noise dynamics (MA part); nk: input delay
- Interpretation
- Captures both input–output dynamics and structured noise
- More flexible and realistic than ARX
- Often needed when residuals of ARX show correlation
- Captures both input–output dynamics and structured noise
ARIMA Models
- ARIMA = Autoregressive Integrated Moving Average
- Extends ARMA for non-stationary series
Integration differencing step
∇y(t)=y(t)−y(t−1)
Makes the series stationary before ARMA modeling
- Interpretation
- AR: memory of past values
- I: removes trends and seasonality
- MA: corrects random shocks
- AR: memory of past values

MATLAB
m = arima(p,d,q)
p = AR order; d = number of differences (integration order); q = order of MA part
Model Evaluation and Selection
Many possible models → need criteria to choose the best one
Avoid overfitting (too complex) and underfitting (too simple)
Common criteria
- Residual analysis (should look like white noise)
- Goodness of fit (%) to validation data
- Information criteria (Akaike information criteria (AIC), Final prediction error (FPE))
- Prediction accuracy (on test data)
- Residual analysis (should look like white noise)
Best practice
- Compare several models with different orders
- Choose the simplest model that explains the data well
- Validate with unseen (test) data if available
- Compare several models with different orders
In MATLAB
goodnessOfFitcompare(data, model1, model2, ...)→ compare fit visually
aic,fpe→ return information criteria
resid(data, model)→ check residuals
Summary
- Time-series data can be broken into components: trend, seasonality, cyclic variation, and residuals
- Models help us explain and predict time-series behavior
- AR models: depend on past outputs
- ARX models: extend AR by including exogenous inputs
- ARMA/ARMAX: combine autoregression with moving average, noise modeling
- ARIMA: adds differencing for non-stationary data
- AR models: depend on past outputs
- Model evaluation and selection
- Check residuals (should look like white noise)
- Use metrics like AIC, FPE, fit percentage
- Validate using unseen data
- Check residuals (should look like white noise)
📌 Different models suit different needs — forecasting, simulation, or understanding system dynamics.
Advanced Modeling and Control
Time series Modelling and analysis Advanced Modeling and Control