
Primary loop analysis
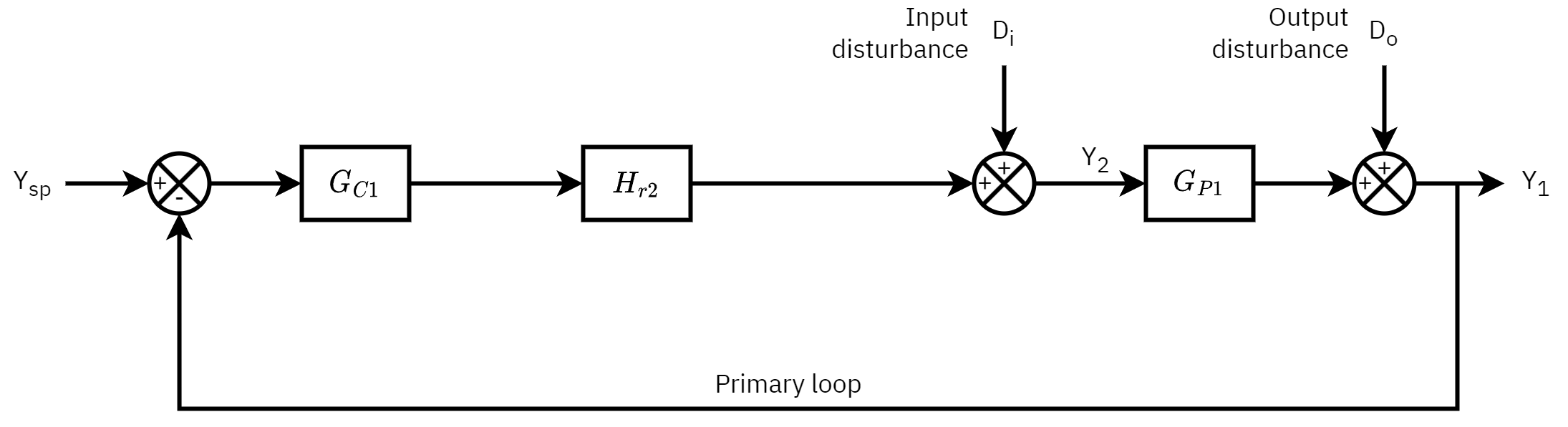
- Augmented primary process
G_{p a}=H_{r 2} G_{p 1} \cong \frac{K_o K_{p 1} e^{-\left(\theta_1+\theta_2+\tau_{c 2}\right) s}}{\tau_1 s+1}
- G_{pa} is used to design or tune the primary controller. This means that the secondary controller should be designed first, as the primary design depends on the H_{r2}.